
ROSTA






2.22
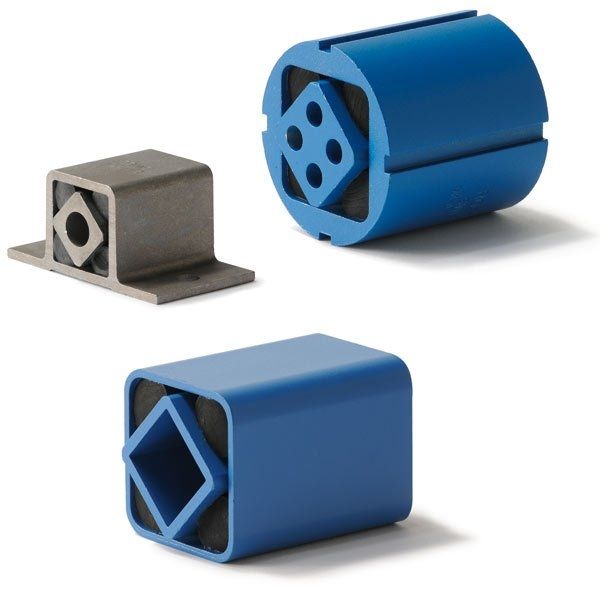
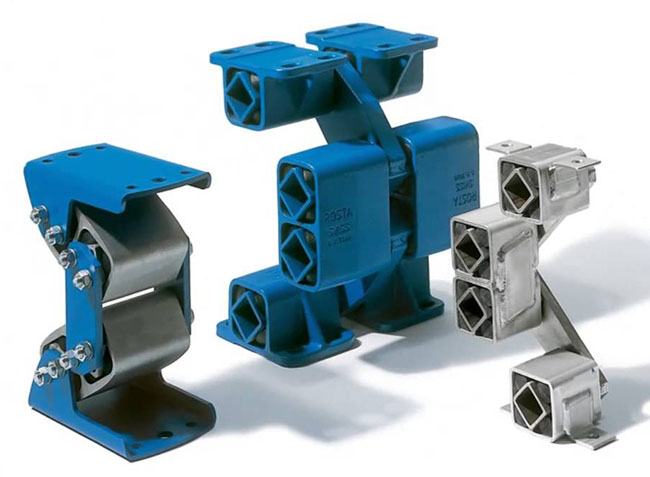
Oscillating Mountings
Technology
1. One mass systems without spring accumulators: Calculation
Subject
Symbol
Example
Unit
Calculation formulas
Length, weight
Trough length
Weight empty trough
Weight of feeding material
Material coupling factor 50% *
Weight of oscillating mass *
L
m
0
m
m
m = m
0
+ m
m
2.5
m
200
kg
50
kg
25
kg
225
kg
Drive parameter
Eccentric radius
Stroke
Rpm on trough
Gravity acceleration
Oscillating machine factor
Acceleration
Total spring value of system
R
sw = 2 · R
n
s
g
K
a = K · g
c
t
12
mm
24
mm
340
min
-1
9.81
m/s
2
1.6
1.6
g
285
N/mm
Rocker arms
Distance between rockers max.
Quantity of rockers
Load per rocker
Selection osc. elements (e. g.)
Center distance of elements
L
max
z
G
A
1.5
m
6
368
N
12× AU 27
200
mm
Drive
Acceleration force
Selection drive head
Drive capacity approx.
F
P
3423
N
1× ST 45
1.0
kW
Spring value
of natural
frequency shaker
Dynamic torque
Dynamic spring value per rocker
Dynamic spring value of all rockers
Resonant ability factor
Md
d
c
d
z · c
d
i
2.6
Nm/°
7.4
N/mm
44.7
N/mm
0.16
*
the following factors have to be considered by the definition
of the material coupling:
– high coupling factor or sticking of wet and humid material
– possible stemming of the trough
2. One mass system with spring accumulators: Calculation
Calculation analog chapter 1 with following additions:
Spring accumulators
Quantity
Dynamic spring value per item
Dynamic spring value of all items
Resonant ability factor
Selection of accumulators
z
s
c
s
z
s
· c
s
i
s
2
100
N/mm
200
N/mm
0.86
Selection ROSTA-elements: AU, AR, AS-P, AS-C
2x cons. of 2x DO-A 45 x 80
Oscillating machine factor
Resonant ability factor with accumulators
By a resonant ability factor i
s
≥
0.8 the system
is usually titled “natural frequency shaker”.
i
s
=
[ – ]
z · c
d
+ z
s
· c
s
c
t
K =
=
[ – ]
· n
s
· R
g · 1000
2
π
60
n
s
2
· R
894’500
(
)
2
c
t
=
m
·
[ N/mm
]
· n
s
· 0.001
2
π
60
(
)
2
Total spring value of system
z =
· 2
[ – ]
+ 1
L
L
max
(
)
Minimum quantity of rockers
G =
[ N ]
m · g
z
Load per rocker
F =
m
· R ·
· 0.001
=
c
t
· R
[ N ]
· n
s
2
π
60
(
)
2
Acceleration force (ST selection)
P =
[ kW ]
F · R · n
s
9550 · 1000 ·
√
2
Drive capacity approx.
c
d
=
[ N/mm
]
Md
d
· 360 · 1000
A
2
·
π
Dynamic spring value per rocker
i =
[ – ]
By a resonant ability factor i
≥
0,8 the system
is usually titled “natural frequency shaker”.
z · c
d
c
t
Resonant ability factor